

Battery Exchange: A Solution to the Energy Needs of Embodied AI
When embodied AI begins to operate in our world, it will run into energy limitations and only operate on a certain radius from its base charging port. If we develop a public charging infrastructure, we can widen the radius and increase the practical support humanoids can provide by tapping into existing energy rated infrastructure from the EV field like parking garages and gas stations. This can take the form of charging hubs or battery exchanges and integrate using apps with registration into charging networks, payment plans, diagnostics and compliance checks.
An Embodied AI Battery Exchange/ charge hub may sound like something out of a sci-fi film, but the underlying idea has been integrated for decades. We already live with energy infrastructure built around our phones and cars. We plug in our electric cars. We dock e-scooters and e-bikes. We rent portable phone chargers from battery bank kiosks in airports, malls, and train stations. We swap propane tanks. We scan, pay, charge, and move on with our day.
If robots are going to become part of daily life, they will need their own version of this. Their functionalities will be extremely limited if they are restricted to relying on private charging at home or in the lab, but their radius will be enormously expanded if there are public places where they can recover power safely, quickly, and predictably. Participation in public life has always depended on support systems. Women’s public range expanded when cities and businesses began to include infrastructure that acknowledged their presence, including restrooms and rest spaces. In a very different but structurally similar way, detachable battery exchange may widen the public radius and potential external-use time frames of humanoid robots. It would not make them more intelligent or capable in any direct capabity, but it would let them go farther, stay out longer, and function more reliably in shared space.
We spend so much time discussing intelligence, autonomy, and capability, but much less time discussing the ordinary infrastructure that would actually make robotic life function properly in public. Embodied AI will need an energy solution and the sooner we postulate how it might work, the earlier we can standardize the design and production of the robots themselves and the regulations surrounding the infrastructure of the energy hubs.
Why this infrastructure matters
For robots, battery life is a core concern for operational deployment. A low battery in a robot is very different from a low battery in a phone. If your phone dies, it is an annoyance but you can slip it in your pocket and borrow a friend’s or transport it easily to a charging port. If a humanoid robot, delivery robot, or quadruped robot loses power in the wrong place, it can become a massive safety issue, an obstruction, a liability issue, or simply a logistics nightmare for removal.
These issues are particularly dire in public spaces. Unlike in a home, robotic failure in a crowded public spot like a supermarket lobby, hotel corridor, hospital hallway, university building, or train station causes a threat to public safety and operations. If these systems are going to move through the same spaces we do, then access to energy becomes part of necessary public infrastructure.
This is one of the seldom discussed conditions of adoption. Robots will not integrate into society on intelligence and mobility alone. They will need somewhere ordinary to recover power and continue.
Where robot charging stations make the most sense
The discussion of where to actually put these charging stations and battery exchanges are places where people already expect systems of docking, waiting, charging, and secure monitored access. It’s also crucial to consider what spaces are already optimised and approved in their electric wiring and grid connections for high energy outputs. Another key facet of the selection is that the locations should be chains or public spaces that are standardized and can have infrastructural updates scaled to where robots may be passing by or frequenting in the first place.
Supermarkets make sense because they are high-traffic, practical, routine spaces that are every few streets in densely populated urban areas but are only owned by a small selection of companies who could scale operations of this retrofit and manage the payment system infrastructure. A robot accompanying someone on errands, carrying goods, or making a delivery could easily need a battery top-up or exchange there.
Shopping malls also make sense because they already operate as shared infrastructure. One charging or battery exchange point could serve many businesses and many robot types in one place. The combination of privately owned domestic robotic charging and retain commercial robotic charging may create an economy of scale whereby the charge could be less expensive or faster.
Transit hubs are especially important. If robots are moving through cities alongside people, then train stations, metro stops, and bus terminals become natural points for energy access. They are also already spaces of circulation, waiting, and transfer. A charge or swap could be mandatory for their use of transport if a robot taps into a public transit system and it shows their battery percentage does not have enough padding to reach their home port.
Hospitals are another strong candidate because reliability matters deeply there. A robot moving supplies, assisting with logistics, or performing routine delivery functions to a visitor cannot afford to fail midway through a task lest it disrupt lifesaving procedures.
Hotels make sense because they combine high energy usage, commercial environments, security and monitoring, logistics, and movement.
Universities are a great candidate, because campuses are dense, mixed-use environments where people, goods, and machines move constantly between buildings.
And parking garages are especially interesting because they already sit at the edge of movement and infrastructure. They are transition spaces. They already carry the logic of vehicles, charging, circulation, and temporary stopping. That makes them a very plausible home for robot energy systems too.
Charging versus exchange
There are at least two ways this could work: localized charging or quick exchange.
With charging, a robot docks by hanging or sitting down, is either assisted or has the capability in its hardware to plug in, waits until it reaches a safe level, and leaves when it has enough power. That works well when the machine is going to be stationary for a while anyway or if the hardware isn’t compatible with most quick release batteries held at charging stations. This is also an option for a robot not registered to a given charging system.
But just like EV trials, exchange may end up being far more useful in public life for its efficiency once the number of electric machines scales.
If a robot has a detachable battery, then the better model may be closer to a gas station, a propane exchange, or a portable power bank kiosk. The robot arrives, checks in and confirms its registration as well as its prepaid or card linked account, docks or hangs securely, removes its drained battery, leaves it behind, and takes a charged one that is compatible with its own system.
This model is much faster and more efficient but it requires a great deal of coordination across a number of independent companies from a range of regions. But it creates the possibility of a much more active battery economy: circulation, monitoring, health checks, pricing, and membership systems. I expect it to operate much in the same way that EV charging is constantly evolving and sprouting new apps, converters and membership options.
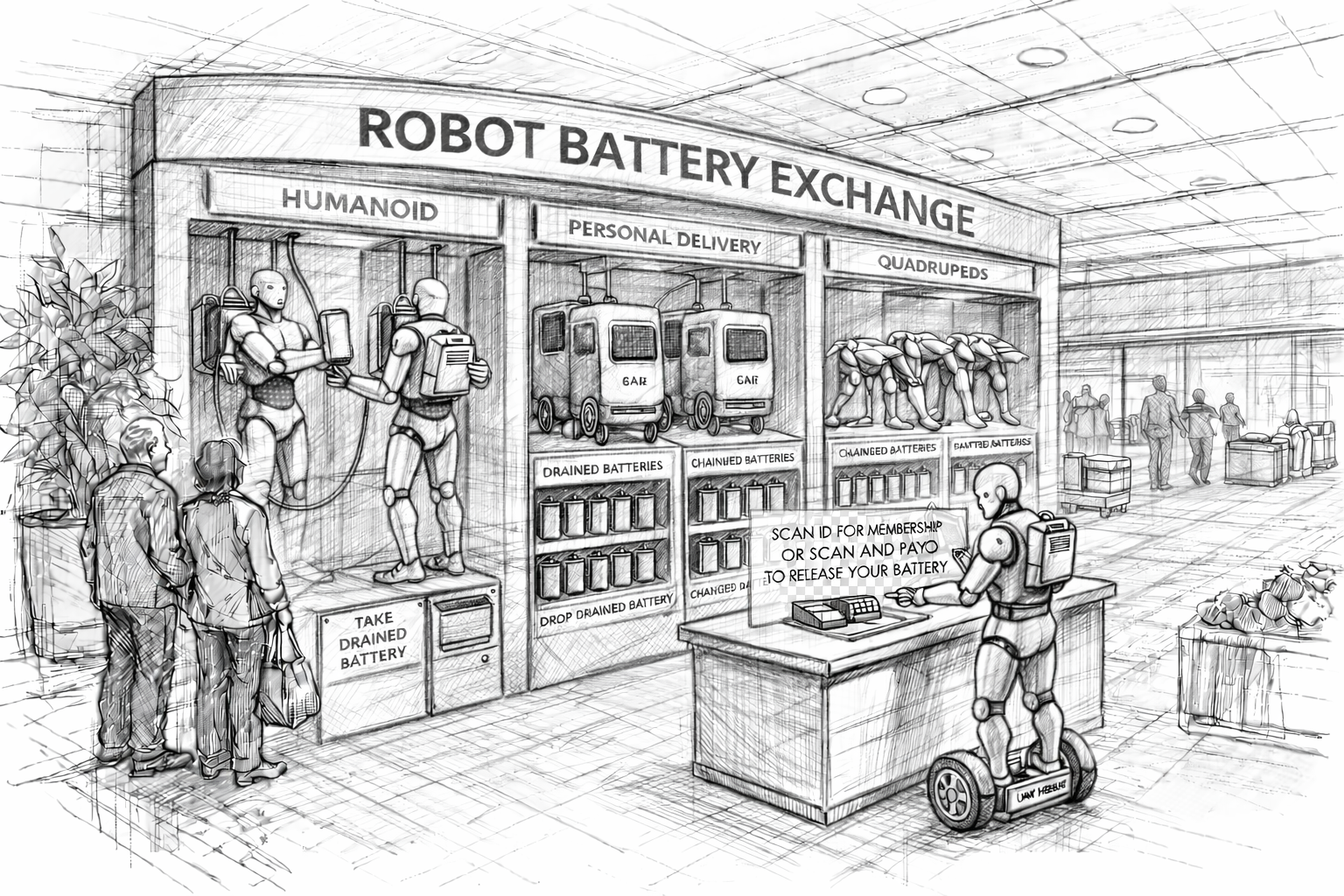
A rendering prompted by Emily of what the Robot Battery Exchange could look like using Chat 5.4
How a battery exchange system could work
A public robot battery exchange station would need to be more structured than a simple plug in the wall. It would need to be organized by robot type and battery compatibility.
There could be separate sections for humanoids, personal delivery robots, and quadrupeds or it could be organized by top brands, if the same batteries work across all models from the same producer. Each section would contain the battery formats that work with those systems. A robot would arrive, scan in its credentials to confirm it is part of the program or register as a guest and put a card on file and go to the correct exchange point for its class.
The process could be fairly straightforward. The robot docks by sitting or hanging in a support mechanism so it remains stable during the swap. That matters, because unless it has multiple batteries or is specifically calibrated for self swapping, changing a battery may affect balance or the robot would need to shut off and be assisted either by a purpose built robot of a biological humans worker. There should be softer surfaces below in case of a fall or instability event, and there should always be an emergency button for biological technical support.
The robot or its human operator could then use their membership or the card now on file with a frozen amount to release the relevant battery and determine its pricing based on how full the old battery was and how full the new battery is. The old battery could also be checked for any operational issues or damage as well as age. The approved drained battery would be deposited into the system. A charged one would be released only if it matches the robot's approved battery type and format.
This creates a system that is not just about charging. It is about exchange, accountability, and circulation.
Membership, payment, and human control
The payment model matters because most robots may not yet be independent economic actors. Even if they can physically navigate the process, many of them will still be operating under human ownership, human supervision, or institutional limits.
That means a battery exchange system should allow for more than one access model. There could be a simple scan-and-pay option for one-off exchanges. There could also be membership systems for frequent use, especially for households, campuses, hotels, or commercial fleets. A human guardian or designated operator could set spending limits, require approval by two factor authentication above a certain amount, or pre-load funds in advance. More sensitive systems might use two-factor authentication, so it could be a setting that a battery is only released when both the robot and the authorized human account approve it.
That matters for safety, but it also matters for control. If robots are going to move through public life, then their access to energy may need to be governed in the same way that other forms of access already are: through permissions, spending rules, and clear lines of responsibility. Energy access would therefore naturally become part of the broader architecture of robotic oversight.
The compliance layer
Certain environments may eventually decide that robots need to meet a minimum battery threshold before entering or operating inside them, especially if they are time or energy intensive environments like transport systems. That would not be especially radical. We already have rules that condition entry on readiness, safety, payment, identification, and compliance. Energy could become the next relevant threshold.
A transit operator, for example, might require a robot to carry enough charge to complete a journey without failing mid-route. A hospital might require a higher reserve for robots moving in patient-facing or service-critical areas. A hotel or supermarket might want to reduce the chance of stalled machines in hallways or entry zones. A university campus might require compliance for robots using shared buildings or transport links.
Energy access and permissions for entry would go hand in hand.
The inevitable apps
Of course, this process is in need of a digital layer.
A robot owner, operator, or the system itself should be able to open a map and see which nearby stations have compatible charged batteries available. Not just a nearby location, but a real-time view of useful information: battery type, quantity available, queue time, compliance status, station hours, support availability, and price.
This is one of the most normal parts of the whole concept because people already expect this kind of visibility. We already check where nearby scooters are. We already look for EV charging points. We already use apps to see bike docks, battery banks, and opening hours. Robot battery exchange would fit very naturally into that same pattern. The app would not just help with convenience. It would greatly reduce public failure risk. A robot could route itself, or be routed, toward places where compatible charged batteries are actually available rather than running low and hoping for the best.
This concept is built from systems people already understand and use on a daily basis. We know how shared charging works. We know how docking works. We know how exchange works. We know how scanning, paying, authorizing, and releasing a resource works. We know how membership models work. We know how apps help people locate and access infrastructure in real time. The only part that feels futuristic or sci-fi is the user of the energy in this case. Instead of a phone, scooter, propane tank, or electric car, the thing arriving to recharge or exchange would be a robot.
Support
If robots are going to become part of ordinary life, then they will need ordinary support systems. That means not only software, not only intelligence, not only technical dexterity, but charging, exchange, stabilization, access rules, emergency support, and compliance standards.
This is why I keep coming back to infrastructure. The future does not arrive only through invention. It arrives through adoption, and adoption depends on the “boring” systems underneath it. Robot battery exchange stations may sound like a niche design problem, but they are really part of a much bigger question: what does society need to build in order for embodied AI to function safely and routinely among us?
The answer, at least in part, is an energy layer. And the places where that layer appears first may tell us a great deal about which robots are welcomed into public life, under what conditions, and with whose permission.